It’s been an incredible week seeing people from all over the world getting their Crazyflies into the air!! We have seen videos of people doing crazy stuff we never thought of, 3D models of cases and frames on Thingiverse and of course a lot of images of people unpacking and assembling their Crazyflies. The wiki is receiving some well needed updates and everyone is helping out answering questions in the forum. It’s really great for us to see this project come to life after such a long time and as far as we can tell we have a lot of happy users, even though there’s still a few people struggling with issues.
Like we said last week, this is the first time we distribute the software/firmware/hardware widely and there’s a few bugs that has been found. We are currently correcting the most important ones and will post updates for the firmware and software once we fix enough of them. If you want to follow the progress drop by the bug tracker on Bitbucket for the PC-client, Crazyflie and Crazyradio.
We are doing our best to answer questions and give support in the forum, but there’s a couple of issues that we would like to highlight to make the assembly and usage easier for everyone. Please be careful with your new Crazyflies, they are not unbreakable.
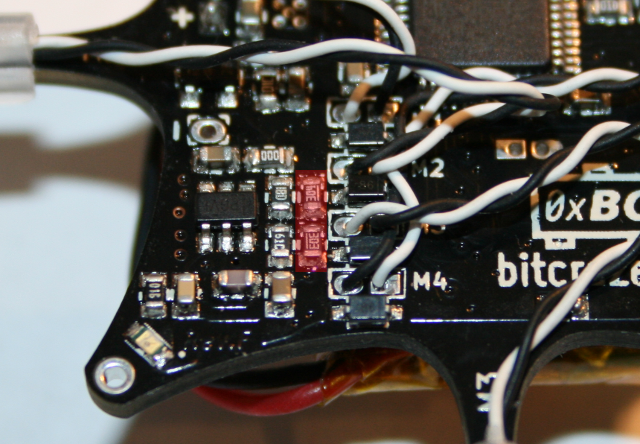
 After the motor wires has been soldered make sure to inspect for shorts and especially to the resistors, red highlighted area, in the picture as it can damage the digital voltage regulator. This will show up as that the blue LEDs wont light up and the other LEDs will be dim. To fix this the regulator U9 will have to be exchanged. It is the SOT23-6 package in the picture.
After the motor wires has been soldered make sure to inspect for shorts and especially to the resistors, red highlighted area, in the picture as it can damage the digital voltage regulator. This will show up as that the blue LEDs wont light up and the other LEDs will be dim. To fix this the regulator U9 will have to be exchanged. It is the SOT23-6 package in the picture.
- The Crazyradio doesn’t work on USB3 ports but a fix is on the way. Until then the work-around is to use USB2 ports.
 If the Crazyflie crashes upside down there is a chance the motor bearing gets depressed. There is a protection for this and that is to carefully glue a spacer between the motor and the propeller, similar to what we have done in the picture. That will prevent the propeller from pushing on the bearing but will instead be pushing on the spacer which will absorb the force much better. The spacer needs to be higher then the motor bearing else it will not work that well.
If the Crazyflie crashes upside down there is a chance the motor bearing gets depressed. There is a protection for this and that is to carefully glue a spacer between the motor and the propeller, similar to what we have done in the picture. That will prevent the propeller from pushing on the bearing but will instead be pushing on the spacer which will absorb the force much better. The spacer needs to be higher then the motor bearing else it will not work that well.
- Loading an already existing input-device configuration in the PC-client does not work, the best is to start from scratch (see this issue). Also when configuring the input-device you will have to map all the axis and buttons before you can save the configuration (see this issue). For more information on device-input configuration see this page on the wiki.
Unfortunately the production of the new motor-mounts has been delayed and they will not be available for order until next week. But the kits that are currently in stock still contains a spare motor-mount.
Happy flying!!
My Crazyflie arrived this morning and I was able to get it assembled and flying within an hour. I’m still getting used to it; it is very squirrely compared to other quads I’ve flown, and it flies with a different orientation (with a single prop being “forward”, I’m used to 2 props aiming forward).
The Windows binary worked like a charm. The Crazyflie connected with no issues and has flown fairly well. I’m hoping to get it trimmed out well enough that it can hover on its own unaided, but I’m not sure how realistic that is.
http://joshlillie.com/wordpress/the-crazyflie-arrives/
Josh, you can configure the quad to fly with 2 props aiming forward in the Crazyflie Client. Just check the X-mode checkbox.
I wondered if that’s what that was, but didn’t get around to testing. Now I have to wait till work is over to test.
Another question: should the motors be physically adjusted to help trim out the Crazyflie, or should they always be snug against the board. I noticed tick marks on the arms, so I assume they’re meant to be adjusted. I only got to fly for about 30 minutes last night but I noticed it was drifting a bit and seemed to want to yaw left. Recommend trimming at the controls or physically adjusting the motor mounts?
I tried enabling “X-mode” and it did not seem to change the orientation. There is a “Client X-mode” that I can check and a “Crazyflie X-mode” that is grayed out and I cannot figure out how to enable that.
I took my front prop and gave it a quick touch with an airbrush so that it would stand out a little better. That certainly helped.
Question about the DEBUG connection. When I connect to the “DEBUG” radio I notice the “meatball” seems to roll seemingly randomly. What is this about? The meatball does not seem to react to my controller.
Hi Josh,
Currently only the “Client X-mode” is supported, but that should work. It will re-calculate the set-values before they are sent to the Crazyflie in order to make it fly in X-mode instead.
The DEBUG driver should only be used for development and will simulate a connection to a Crazyflie. But currently there’s no feedback from the input-device to the horizon indicator. The horizon-indicator will just show false data to test it.
/Marcus
Strange, X Mode does not seem to be working for me either.
Serge
Hi Tobias,
Regarding the washers/spacers on the motors, can you tell us the rough dimensions needed so I can order some while waiting for my crazyflie (inner diameter, height)?
Thanks in advance
The spacer should have an inner diameter of 1.7-2.0mm, an outer diameter of 3.0-5.0mm and a thickness of 0.5mm.
Thanks!
Where can you get a spacer that small?
hey i have a quick wuestion i want to order one but this is whats stopping me as soon as i under stand it i will order so please help.
1. is the programming for it like a write code as if you were doing html or are you checking boxes and such.
2. how do you control it??? are you just using the arrow keys on the pc or are you dragging and dropping blocks saying go forward 2 feet then turn.
….. or are you basic programing it.
3. if this is a write code sort of deal instead of checking boxes what form of code does it take. thanks sorry to ask questions just have not seen them answered anywhere maybe a video of how to control it would be cool i know you guys are buissy tho.. thank you
1. Writing code, no boxe. Note that you don’t have to program a single line of code to fly it, but also note that this was mainly made for hobby developers who want to try some own ideas.
2. You can control it with anything you want: The most common way atm is a ps3 or xbox controller attached to a pc, but potentialy you can also use an E-Sky Transmitter (beta), a Smartphone (experimental) or program somthing to control it with a pc.
3. The pc side is mostly programmed in python, the firmware in c (microcontroller).
Everything (you asked for) is well documented if you spend a couple of minutes on this site (take a look at the wiki)
I wanted to say that my 10DOF CrazyFlie arrived on Saturday.
I am very impressed with the package, opening the box was just as much fun as assembling it. I am very impressed with the PCB fabrication and stuffing. Very high quality. The led’s are awesome, the momentary switch to boot it up and turn it off is way cool.
I had trouble getting the PS3 controller to map it’s analog sticks, currently only the D-Pad registers :-( but I’m sure it’s something I must be doing wrong. I’ll keep trying. I have not been able to fly it yet.
Mostly wanted to say thank you and good work to the Crazyflie team !!
David Cook
We are so glad you like it David! Have fun with it and handle it with care ;-)
Stop buy the forum an there might be some answers to you PS3 controller mapping.
Recieved my crazyflie today after I returned home from my last exam of the year! Such a great thing to come home to. Got it up and running and boy does it deserve the name Crazyflie!
Awesome work guys it’s a fantastic little thing!
Thanks
Are there any more 10DOF units on the way to Seeed? They’re sold out, and I want one! :(
Hi Johnny,
Yes, there are a few more units that will show up soon but we don’t know exactly when. If you register using the “Notify Me” form you will get an email when they are back in stock.
/Marcus
I received my Crazyflie Sat, it was straight forward putting it together. Crazy radio software install was a breeze on a notebook computer running Windows XP. PS3 controller hooked right up. This little thing rocks! I still need to recalibrate the software, Crazyflie takes off quickly and responds quickly. I’m looking forward to playing with the advanced features of the Crazyflie software. I can see how powerful this platform is and how much fun it will be tinkering with this Crazything. Thanks to all whom made this little gem possible, I look forward to see what kind of hacks will be accomplished with this Crazyflie. Thanks again!
Hey,
Unfortunately I can’t use my crazyfly at the moment – my linux laptop only has USB3 ports. Do you have an ETA when crazyradio USB3 support will be included?
John
Hi John,
The issue has been fixed and tested but there’s still no downloadable binary for it. We add this next week.
If you want to build the new firmware youself have a look at this thread: http://forum.bitcraze.se/viewtopic.php?f=8&t=122&p=553&hilit=nrfbootload#p563
/Marcus
Hi Crazyflie team,
Awesome job, received my unit last week and today had some time to put it together and fly around.
I must say amazing job, well put together. Intermediate soldering skills required and osx install took some tinkering but apart from that well done! I did not expect it would fly so stable at this size, tried three accu’s indoor and also one outdoor. Last one nearly gave me a heart attack, after radio loss apparently also the PS3 controller lost connection and when I reconnected it took off full blast… At ~25 meters height I disconnected and it landed in the yard of my back door neighbor. (Some 50 meters away) After a search and resque mission amazingly, NO DAMAGE at all.
Keep up the great work, only one request: please add a check in the connection routine to make sure controller is connected and throttle is 0. :-)
Regards, Roger
The Netherlands.
Hi Roger,
Thanks! Happy to hear that you are enjoying it.
Glad to hear that you Crazyflie is still ok, we have this issue reported and will try to fix it ASAP.
https://bitbucket.org/bitcraze/crazyflie-pc-client/issue/43/removing-the-input-device-while-the-copter
https://bitbucket.org/bitcraze/crazyflie-pc-client/issue/35/when-disconnecting-the-joystick-the-last
/Marcus